hunter development platform.
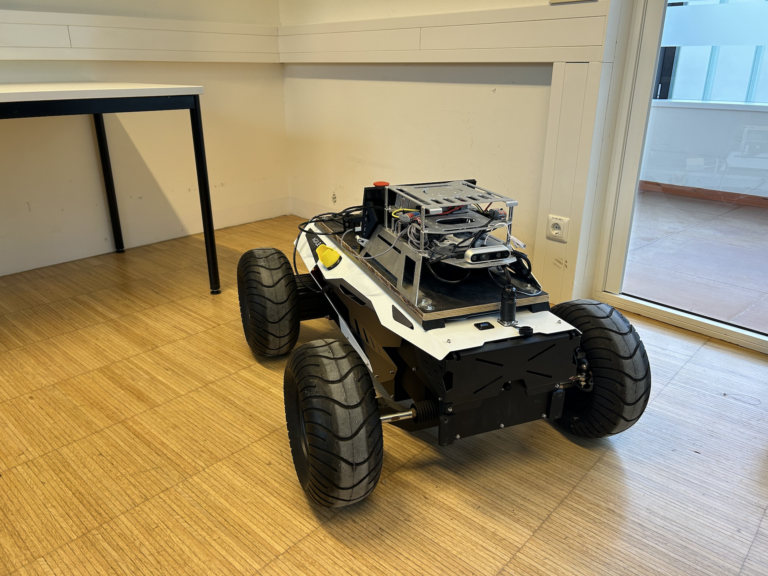
Es handelt sich um eine Entwicklungsplattform für vielfältige Roboteranwendungen im Automotive-Bereich. Mit zusätzlicher Elektronik und Sensorik ausgestattet, ist der Roboter in der Lage, intelligente Aufgaben zu bewältigen.
komponenten.
roboter.
Hunter Development Platform
Entwicklungsplatform für Roboteranwendungen im Automotive-Bereich.
elektronik.
Nvidia Jetson Xavier AGX mit CAN Anbindung
Das Herzstück des SmartRobis ist ein Nvidia Jetson Xavier AGX. Dieser Minicomputer steuert die Hunter Development Platform und führt alle Berechnungen für verschiedene Anwendungen durch.
kamera.
Intel RealSense
Für die Kamera wird eine Intel RealSense 3D-Kamera verwendet, die neben der Aufnahme eines Videostreams auch eine Tiefenmessung mit Hilfe einer Infrarot-Kamera durchführt.
docker.
Nvidia Jetson Container mit GPU/CUDA Unterstützung
Nvidia Jetson Container sind spezielle Docker-Container, die für die Nvidia Jetson Plattformen optimiert wurden. Diese Container ermöglichen es, Anwendungen isoliert vom Host-System auszuführen und bieten dabei Unterstützung für GPU und CUDA.
robot operating system.
ROS2 Humble
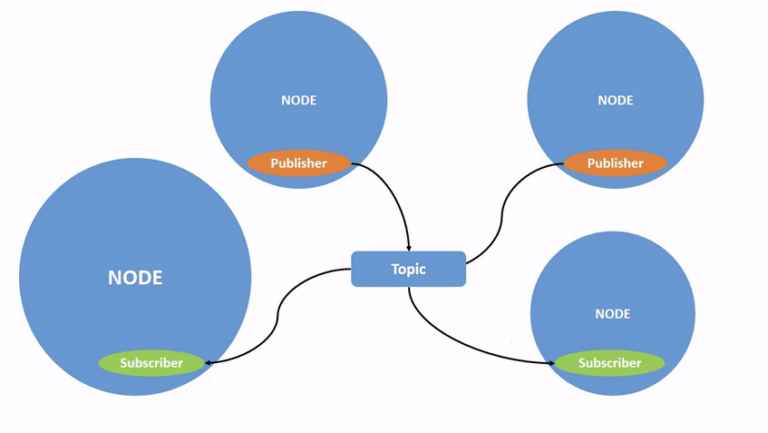
ROS2 (Robot Operating System 2) dient als Betriebssystem des Roboters und ermöglicht die Kommunikation zwischen den einzelnen Komponenten mittels des Publish-Subscribe-Patterns. Dies erlaubt die modulare und skalierbare Entwicklung von Anwendungen, die an den jeweiligen Anwendungszweck angepasst werden können.
ki.
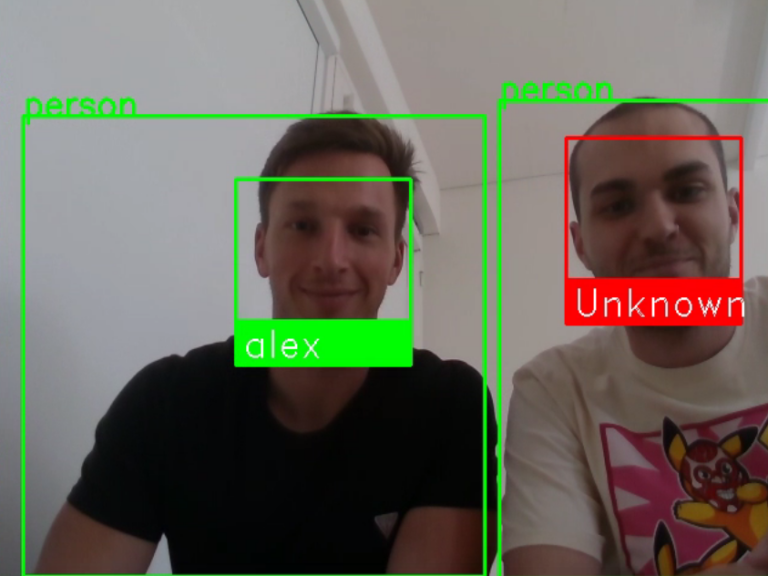
Künstliche Intelligenz für Objekt- und Personenerkennung
Durch den Einsatz von Künstlicher Intelligenz wird der Roboter intelligent und kann Objekte sowie Personen erkennen. Dies ermöglicht Anwendungen, die sich flexibel an die jeweilige Situation anpassen können.
ros2 kommunikation.
Einzelne Subsysteme (Geräte/Komponenten) in der Entwicklungsumgebung werden als sogenannte Nodes entwickelt. Diese Nodes kommunizieren innerhalb des ROS2-Kommunikationsnetzwerks über sogenannte Topics. Dabei wird das Publisher-Subscriber-Pattern verwendet: Der Publisher sendet Daten oder Nachrichten an ein Topic, und alle Subscriber dieses Topics empfangen die Daten. Es können mehrere Subscriber und Publisher gleichzeitig Daten an ein Topic senden bzw. von diesem empfangen.
applikationen.
Beispielsweise wurde eine Applikation entwickelt, bei der der Roboter mithilfe von KI einer Person bis auf einen bestimmten Abstand folgt. Außerdem wurde eine Gesichtserkennungssoftware erstellt, die vortrainierte Gesichter erkennen und den Namen der jeweiligen Person anzeigen kann.

follow me demo.
© 2024
SmartRobi
FH Oberösterreich Campus Hagenberg